-
Algorithme et programmation
Comment programmer le déplacement d'un robot. (TP1)
 Il existe des robots qui se déplacent de manière autonome pour transporter des produits d'un espace de stockage à un autre.
Il existe des robots qui se déplacent de manière autonome pour transporter des produits d'un espace de stockage à un autre. Les robots Kiva par exemple, déplacent en permanence les étagères d'un entrepôt où sont stockés les produits à livrer.
Les préparateurs de commandes ne perdent plus de temps à déambuler dans les allées puisque les étagères comme les produits viennent automatiquement.
Une video est disponible ici : video 1
MISE EN GARDE AFIN DE NE PAS CASSER LE ROBOT et LUI EVITER DES CHUTES
IL FAUT TOUJOURS METTRE LE ROBOT SUR LE DOS, c'est à dire, les roues faces au plafond
SITOT LE PROGRAMME TESTE
PARTIE 1
Étape 1 Analyser le déplacement du robot mBot
Présentation du robot :
1. Donner un exemple de situation où l’on programme le déplacement d’un robot et l’avantage qu’en tirent les êtres humains.
réponse ...........

information : mbot est un robot muni de deux roues activées par deux moteurs. Il est programmable à l'aide du logiciel mblok
2- Lancer le logiciel mBlock et Ouvrir le fichier "Projet 3 Deplacement 1.sb2" qui se trouve dans le dossier "LOGICIEL"
3 Allumer le robot et implanter le programme
(Lisez le document ci-dessous partie : 1- Implanter un programme par connexion filaire)
4. Observer le comportement du robot. Mesurer et noter la distance et le temps de déplacement.

réponse : ......................
5- Lancer le logiciel mBlock et Ouvrir le fichier "Projet 3 Deplacement 2.sb2" qui se trouve dans le dossier "LOGICIEL"
6- Allumer le robot et implanter le programme (voir document ci-dessus pour implanter le programme)
7. Observer le comportement du robot. Mesurer et noter la distance et le temps de déplacement.
réponse : ................
Étape 2 Modifier, compléter, écrire un algorithme
1. Reporter dans le tableau qui suit les distances que vous avez obtenues dans la 1ère étape lors des deux déplacements.
Distance D parcourue (cm) ................ ................ Temps T (seconde) 1 2 Vitesse V = (D/T) ............... ............... 2 - Calculer dans les deux cas la vitesse V de déplacement. Noter vos résultats dans le tableau.

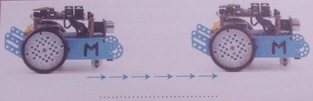
Information : le déplacement du robot mBot se fait grâce à deux moteurs (M1 et M2) qu'il faut activer. Dans les situations ci-dessous le robot avance par défaut à la vitesse 100 (vitesse par défaut donné par le constructeur du robot) pendant une durée fixée en seconde. Pour arrêter le robot, on met sa vitesse à zéro.
3 - Préciser le paramètre à modifier si on veut régler la distance de parcours du robot.
réponse : ............
4 - Compléter l’algorithme de la situation 2 et celui de la situation 3.
Algorithmes
Situation 1
Le robot avance
environ de 10 cm
Situation 2
Le robot avance
environ de 20 cm
Situation 3
Le robot avance
environ de 50 cm
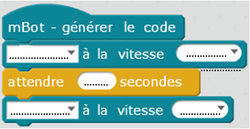
Avancer tout droit à la vitesse 100
.................................. .................................... Pendant 1 seconde .................................. .................................. Arrêter les moteurs .................................. .................................. Étape 3 Ecrire un programme
Phase 1 : Programmer le déplacement du robot
1 - En vous aidant de l'algorithme de la situation 3 (étape2), compléter ci-dessous le programme pour que le robot avance de 50 cm.
2- Lancer le logiciel mBlock et Ouvrir le fichier "Projet 3 Deplacement 3.sb2" qui se trouve dans le dossier "LOGICIEL"
3- Sélectionner le lutin "Robot mBlot" et cliquer sur l'onglet Scripts.
Aide Programmation par Blocs 
Ce bloc d'instruction permet de faire avancer le robot 4 - A l'aide des blocs des rubriques CONTROLE et PILOTAGE, compléter le programme pour que le robot avance de 50 cm.

5 - Allumer le robot et implanter le programme (voir document ci-dessus pour implanter le programme)
6 - Tester votre programme et observer le comportement du robot. Que constatez-vous ?
PARTIE 2
 Pour aller plus loin :
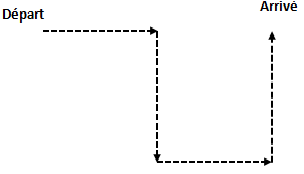
Pour aller plus loin :Rechercher l'algorithme et le programme associés au trajet ci-dessous.
Chaque segment a une longueur de 20 cm
PARTIE 3
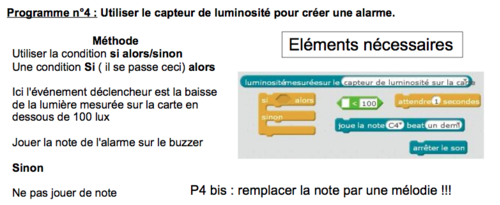
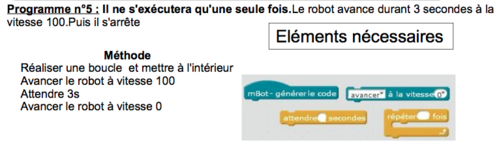
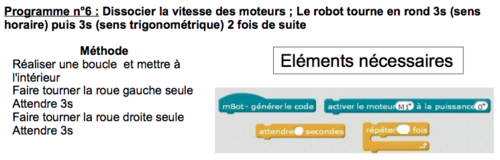
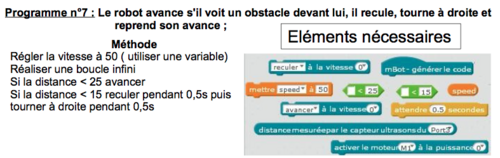
Petits tests à réaliser avec le robot mBot :













|
|
|
|